Quelques mots pour décrire mon projet.
D’abord les contraintes : en premier et pour le moment imparable ; impossible de faire un tour de pièce, les murs étant occupés par des armoires et placards ; reste 5 x 3m au milieu de la pièce, ce qui obligera à ménager des trappes au milieu du réseau.
Cahier des charges :
• niveau 0, une grande gare avec rotonde et triage pour faire des manœuvres,
• niveau -1, une gare cachée avec boucle de retournement,
• niveau +1, une petite gare secondaire avec boucle de retournement.
Dans le plan ci-joint, les voies montantes des hélices ont un rayon de 75 cm avec une pente de 2% pour passer du niveau -1 au niveau 0 (dénivellation : 28,5 cm grâce à quelques rampes additionnelles) et de 2,1% pour passer du niveau 0 au niveau +1 (dénivellation : 13 cm).
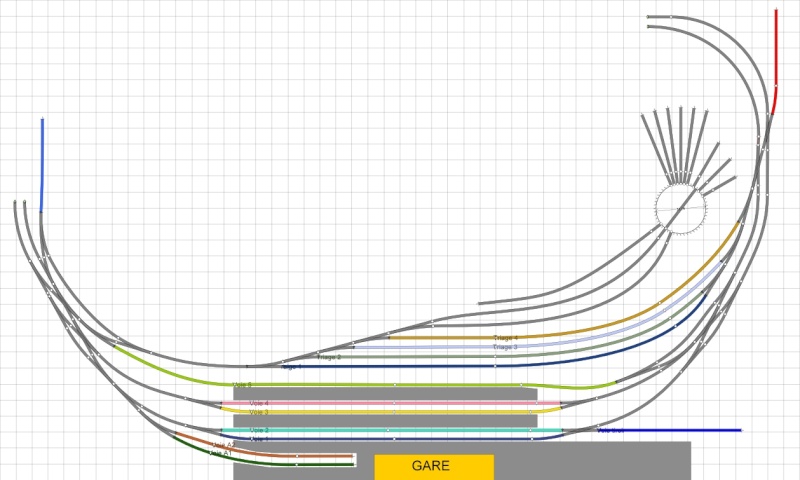
Plans sous Anyrail:
Niveau 0:

Niveau 1

Niveau -1

Sur le schéma du niveau 0, on peut voir vers la gauche le départ de la montée vers le niveau 1 et vers la droite le départ de la rampe qui permet de rejoindre l’hélice descendant vers le niveau -1.
Les 2 hélices, la montante et la descendante, sont situées l’une au dessus de l’autre, ce qui permet de gagner de la place.
Les cantons de gare et de triage font un minimum de 2,10 m, ce qui permet de loger un train de voyageurs à 6 ou 7 wagons type OCEM (je me situe résolument dans la période III/IV).
La gare principale dispose de 5 voies plus 2 voies pour les navettes avec la gare secondaire, laquelle sera abordée alternativement par la droite ou par la gauche grâce à une boucle de retournement à doubles voies. J’ai prévu une voie centrale à double sens pour les trains qui ne s’arrêteront pas dans cette gare.
TC gérera un trafic de fond en automatique pendant que des manœuvres auront lieu entre le triage de surface, la gare et la rotonde en utilisant le mode manuel ou en imbrication (oups !...j’ai oublié comment on doit dire maintenant) et des trajets automatiques quand je saurai en faire des complexes.
Rails et aiguillages Tillig, moteurs en test en ce moment entre Tortoise et servomoteurs avec décodeurs Viessmann (comme les manœuvres seront commandées à partir de l’écran TC, le problème soulevé par AlainUSA de la remontée de l’état des aiguillages à TC ne se pose pas).
Je suis avec grand intérêt les discussions passées et présentes au sujet de la rétrosignalisation ou non des zones d’aiguillages et n’ai pas encore fait un choix définitif. Sans doute des aiguillages hors canton avec rétrosignalisation des zones d’aiguillages et des wagons consommateurs de courant (ou du moins le dernier). Je l’ai expérimenté sur un banc de test et n’ai eu aucun problème.
Et maintenant les questions qui s’adressent à ceux qui ont l’expérience d’exploiter un réseau de cette nature :
J’aimerais avoir votre avis sur le schéma général et plus particulièrement sur le schéma du niveau 0 :
Autorise t-il une exploitation réaliste et que pourrait-on faire pour l’améliorer ?
Merci d’avance à tous de vos avis.
PS: Petite curiosité: à l’instar de AlainUSA, je me suis amusé à représenter tout ça sur Sketchup et voilà ce que ça donne:
(tous les décors sont fictifs et pour certains, récupérés dans une bibliothèque d'images)

Autre vue des hélices à l'intérieur de la montagne:






 [/img]
[/img]